

司南技术π·第2期 | 测深仪安装与技术讲解
-
返回主菜单产品
-
返回主菜单服务支持
-
返回主菜单关于司南
-
返回主菜单投资者关系
-
返回主菜单加入我们
司南技术π·第3期 | 低速无人载体中的组合导航接收机应用
返回列表知识分享
作者:司南导航
发布时间:2025年07月10日
关注企业公众号:


核心导读
低速无人载体正在成为自动驾驶普及的重要场景,而物流配送最关键的“最后一公里”也将因为低速无人载体技术的成熟而得到充分解决。本期司南技术π将为大家介绍基于 M20X 双天线组合导航接收机的低速无人载体高精度定位解决方案。方案集成司南自主研发的北斗高精度定位定向板卡、车规级高性能 IMU、RTK 与组合导航算法,并支持在线标定功能,可在多样化工况下提供连续、稳定的高精度位姿数据,为低速无人载体在 L4 级自动驾驶、园区物流、矿区作业等应用中提供有力数据支撑。
01应用前景
低速无人载体又称“低速无人驾驶装备”,是指行驶速度一般低于50km/h,搭载传感器、控制器、执行器等装置,融合通信与网络技术,具备L4级及以上驾驶自动化水平的新型运载工具。低速无人载体使用场景相对简单固定,主要包括城市、园区、校园、景区、机场、矿山等;应用范围包括特定区域的物流配送、人员接驳、矿山开采、餐饮及零售服务等,按照类型可分为载人、载货等。对于特定应用场景下的低速无人载体,其路线相对固定,环境变量较少,算法鲁棒性较高,可以在固定区域内达到L4级自动化驾驶水平。因此,低速无人载体具有应用场景丰富,发展前景广阔,规模化应用潜力大,商业化价值高的优势。

在国家政策层面上,政府也在积极推进低速无人载体等相关产业的发展。截至2024年底,我国快递业务量达1750.8亿件,同比增长21.5%。我国网上外卖用户规模达5.9亿人次,同比增长8.8%。面对逐年提高的物流需求,2025年5月,由商务部等8部门联合印发了《加快数智供应链发展专项行动计划》,重点提出“推动降低全社会物流成本”,推广智能立体仓库、自动导引车、无人配送车等设施设备,实现人、车、货智能调度。
目前,智能网联汽车“车路云一体化”应用试点工作在全国各大城市开展。以京东、美团、顺丰等企业在深圳坪山大工业区的试点为例,无人配送车辆可全天候运营,单日平均完成8万次快递运输,较传统模式降低每单成本1.32元,综合效率提升30%,同时显著缓解夜间配送人力短缺问题。
综合以上信息可知,低速无人载体的大范围应用可有效降低人力成本,提高运输效率,降低事故率,经济效益显著。
02组合导航在低速无人载体的应用
与当前乘用车重感知轻地图、端到端的自动驾驶方案不同,低速无人载体由于其行驶区域与路线相对固定,因此更倾向于使用激光雷达+视觉+高精地图的多源融合方案实现有限区域的L4级自动驾驶。相较于自动驾驶乘用车,低速无人载体无需采购图商的高精地图产品,使用车辆自带的激光雷达、摄像头,即可完成局部地图的构建。
在地图构建阶段,通过引入高精度定位信息,可将局部坐标系与世界坐标系关联起来。当环境相对恶劣时,如暴雨、雾霾、扬尘等,激光雷达和摄像头等传感器将受到较大影响,可能无法正确匹配地图信息,导致丢失车辆位置信息,丧失路径规划与导航能力。M20X双天线组合导航接收机不受外界环境影响,可持续输出高可靠性位置、速度、姿态信息,协助车辆完成地图匹配,从容应对各种复杂情况。
因此无论是地图构建阶段还是自动驾驶阶段,实时并连续获取车辆的精确位置姿态信息对于L4级自动驾驶系统都是必要的。

M20X双天线组合导航接收机搭载司南导航自研的北斗高精度定位定向板卡K922,搭配司南高精度RTK算法,空旷环境下定位精度可达厘米级,可以满足车辆实时获取世界坐标系下绝对位置的需求。然而由于GNSS本身存在的局限性,在信号受到影响的城市峡谷、树木遮挡等复杂环境下,定位精度会受到较大影响,无法持续提供厘米级定位。在部分完全遮蔽场景,如地库、隧道,GNSS则会进入不可用状态。
惯性导航系统(Inertial Navigation System, INS)是一种完全自主的导航系统,无需获取任何外部信息,通过陀螺仪和加速度计来测量系统角速度与加速度,从而进行独立的位置、速度、姿态推算。M20X搭载高精度车规级6轴IMU模块,搭配司南自研组合导航算法,在GNSS信号受到干扰或遮蔽时,通过惯性导航输出连续的位置、速度、姿态信息;在GNSS信号恢复正常后,利用GNSS定位测速结果对INS推算结果进行校正以消除累计误差。两个系统的协同工作,可以得到连续的高精度位置、速度、姿态信息,满足L4级自动驾驶对实时高精度位姿的需求。
03组合导航外参的测量与估计
在使用M20X组合导航设备之前,精确测量并配置杆臂参数并使用在线标定功能估计设备安装角是保证组合导航结果精度的前提。
GNSS约束与天线相位中心杆臂的关系
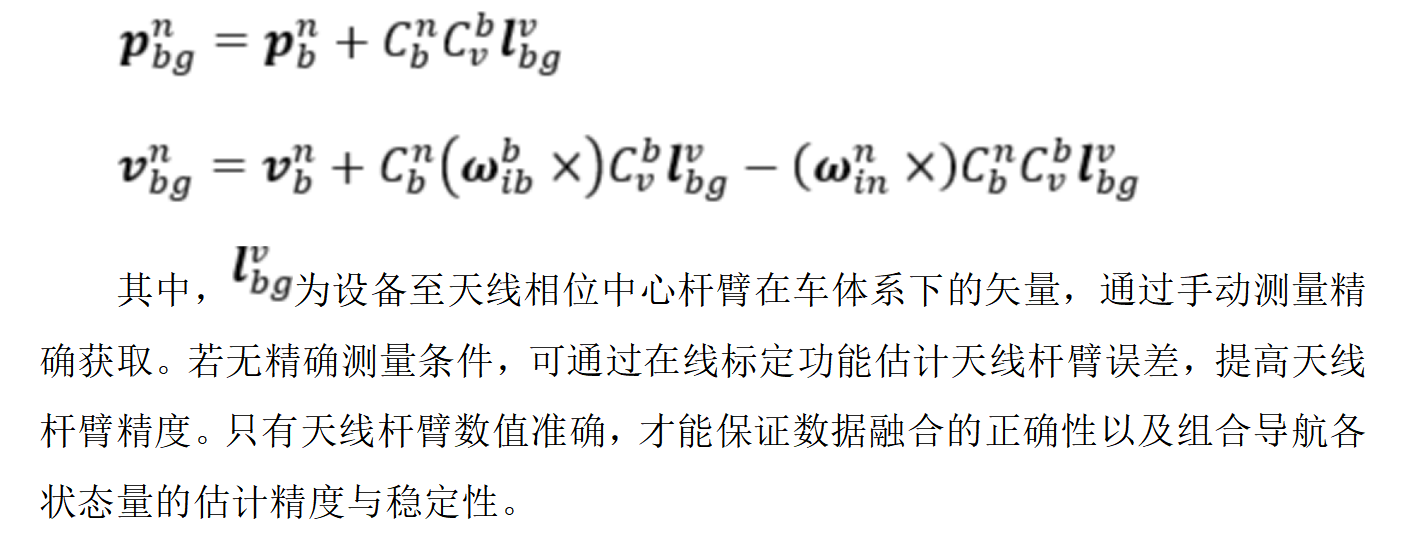
从组合导航设备坐标系原点到主天线相位中心构建的矢量在车体系下的三维坐标被称作天线相位中心杆臂,简称天线杆臂。
低速无人载体的GNSS天线一般位于车辆顶部,而组合导航设备则推荐安装于车辆底盘附近,设备坐标系原点与GNSS天线相位中心在空间上存在偏差。在使用GNSS位置、速度对组合导航系统进行修正时,需要将设备坐标系原点处的位置和速度,通过天线杆臂转换至天线相位中心位置,保证两者在同一位置进行数据融合。
以下是通过天线杆臂将设备位置和速度转换至天线相位中心的公式:
车辆运动模型约束与后轮轴中心杆臂、设备安装角的关系
从组合导航设备坐标系原点到车辆后轮轴中心的矢量在车体系下的三维坐标被称作后轮轴中心杆臂。
当设备坐标系三轴方向和车体坐标系三轴方向不平行时,车体坐标系需沿Z-Y-X轴旋转一定角度后才能和设备坐标系三轴平行,三轴旋转的角度被称作设备安装角。
通过后轮轴中心杆臂与设备安装角,可以将设备坐标系原点速度转换至车体坐标系后轮轴中心速度。转换公式如下:
以搭载阿克曼前轮转向底盘的无人车运动模型为例,当车辆前进或小幅度转弯时,车辆后轮在车体坐标系的横向和垂向上一般不发生位移。因此,在车体坐标系下,车辆后轮中心处在横向和垂向速度可近似为0。基于该运动模型假设,可针对后轮轴中心处横向和垂向速度进行约束。
此外,当设备有轮速输入时,后轮轴中心处前向速度即为左右轮轮速均值。通过获取车辆底盘输出的轮速数据,可以对车辆后轮轴中心处前向速度进行约束,提高车辆在失锁场景下的速度与位置精度。
因此,正确测量后轮轴中心杆臂,精确标定设备安装角,可以保障车辆运动模型约束效果,提升失锁场景下惯导递推精度。为了保证设备安装角尽可能小,安装设备时应尽量保证水平安装,同时将设备x/y轴与车辆纵/横轴对齐。若设备安装不规范导致设备安装角较大,则需要针对设备安装角进行在线标定。
M20X组合导航接收机地下车库场景性能分析
司南M20X双天线组合导航接收机集成在线标定功能,可在5min内快速估计天线杆臂误差与设备安装角,提高失锁场景下的组合导航精度。接下来将通过数据仿真,对比验证以下两个问题:
• 验证天线杆臂、后轮轴中心杆臂与设备安装角对于组合导航设备失锁精度的影响。
• 验证失锁场景下,轮速数据在组合导航的应用效果。
从组合导航设备坐标系原点到车辆后轮轴中心的矢量在车体系下的三维坐标被称作后轮轴中心杆臂。
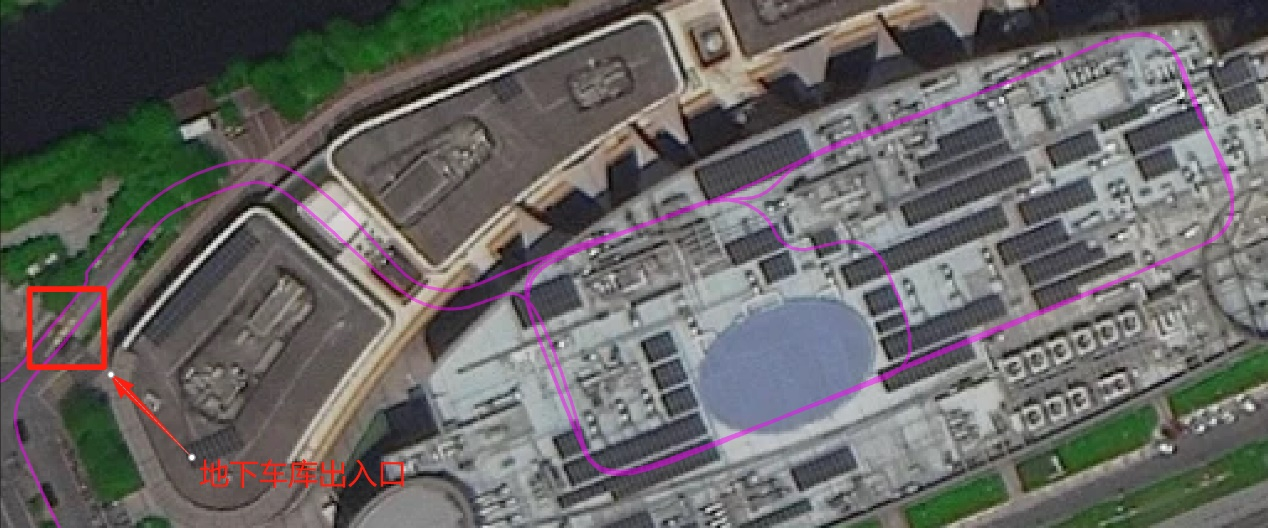
仿真采用一组地下车库失锁场景的数据,失锁时长共281s,最大速度7.31m/s,平均速度约4.07m/s,失锁行驶里程约1.14km。
仿真对比设置如下:
• 天线杆臂、后轮轴中心杆臂均存在30cm误差,设备安装角未估计,未融合轮速;
• 天线杆臂、后轮轴中心杆臂测量准确,设备安装角完成估计,未融合轮速;
• 天线杆臂、后轮轴中心杆臂测量准确,设备安装角完成估计,融合轮速;
参考真值由SPAN-ISA-100C光纤组合导航系统提供,失锁时段M20X三维位置误差如下:
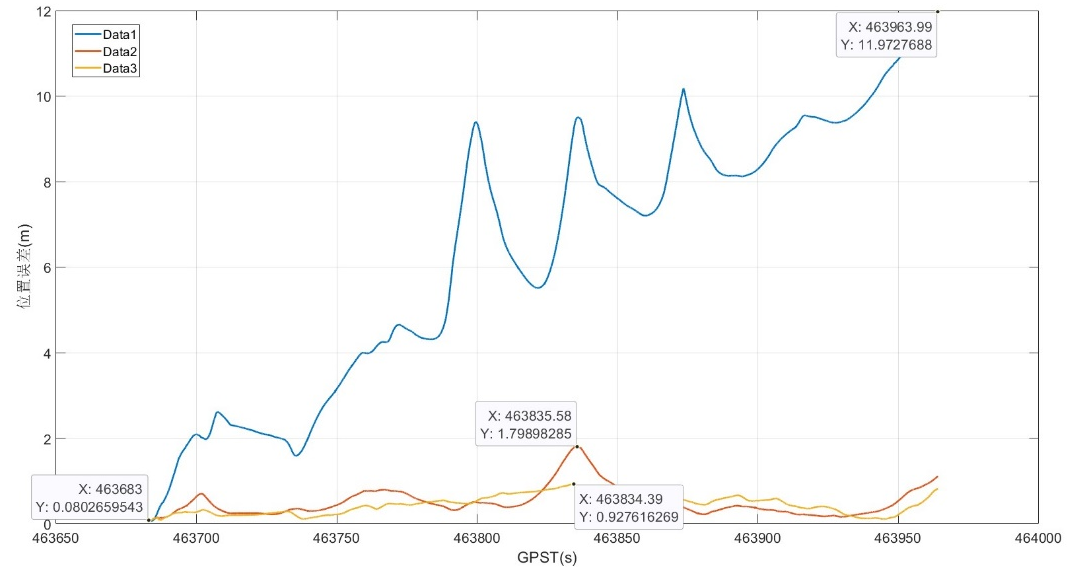
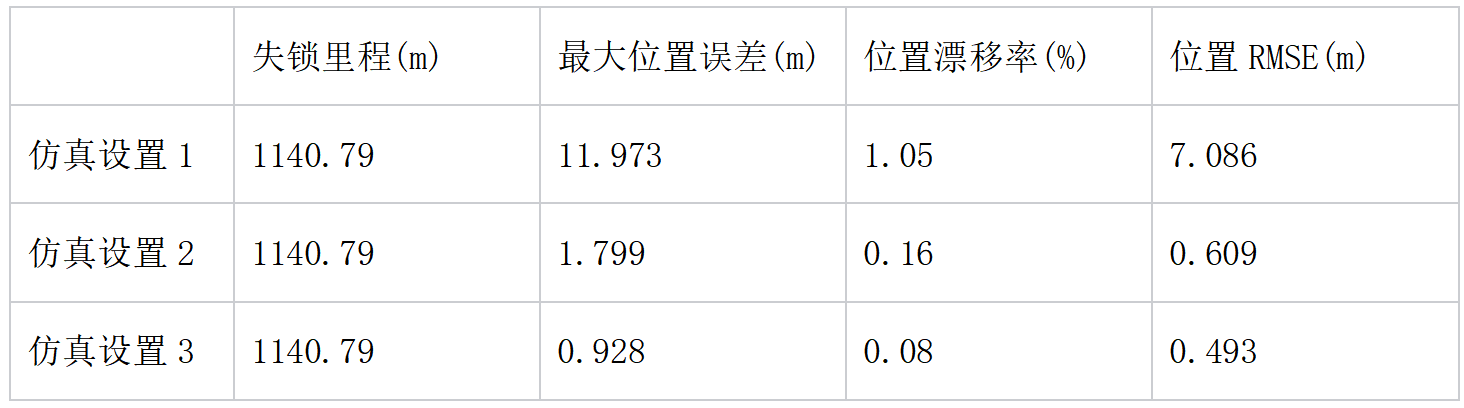
由以上仿真结果可知:
• 杆臂与设备安装角不准确会极大影响组合导航失锁场景下的递推精度。为了保障设备精度,应尽量准确测量杆臂参数并在使用前进行在线标定。
• M20X在融合轮速后可进一步提高失锁场景下惯导递推精度,为了保证长时间失锁的位置精度,可为设备提供底盘轮速数据。
04在低速无人载体的应用与挑战
低速无人载体应用场景的挑战
组合导航在低速无人载体应用场景通常会遇到以下挑战:1、载体行驶速度相对较慢,航向收敛速度慢;2、GNSS天线高度较低,定位精度受到影响。3、普遍不搭载悬挂系统,行驶地形相对复杂多变,车身颠簸较剧烈。
M20X双天线组合导航接收机可实时获取双天线定向结果,静态即可完成组合导航初始化,同时在载体运动过程中实时约束设备航向,提高组合导航航向精度。M20X集成GNSS质量控制模块,针对参与融合结算的GNSS数据质量进行综合判断,保障融合正确性。针对车身颠簸剧烈问题M20X也进行了优化,提高了惯导递推精度。
多样化载体模型的挑战
差速无人车对驱动轮胎的电机输入不同的转速指令,通过轮胎之间的速度差控制载体的运动状态,按差速类型一般可分为两轮差速无人车和四轮差速无人车。差速无人车的优点是转向灵活,通过控制轮胎转速可以实现车体转弯半径为0。
两轮差速无人车通常包含两只独立驱动的驱动轮以及一或两只万向轮辅助车辆保持平衡,通过独立控制左右轮速度,实现载体灵活移动与转向。履带式差速无人车包含左右对称的履带结构,同样符合两轮差速模型,属于广义上的两轮差速无人车。两轮差速无人车模型相对简单,基于两轮差速运动模型即可较为准确地进行载体速度约束。

四轮差速无人车通常包含四只独立驱动的驱动轮。该模型结构简单,但动力学与运动学模型复杂,适合户外复杂环境作业,在军事、勘探等领域应用广泛。相较于两轮差速无人车,四轮差速无人车在转向时,其后轮轴中心位置不满足横向和纵向速度为0的假设,因此两轮差速运动模型无法适用于四轮差速无人车。
多轮转向无人车相较于前轮阿克曼转向无人车拥有更小的转弯半径以及更丰富的载体运动模式,运动灵活性优于前轮转向载体,虽然转向灵活性不及差速无人车,但转向稳定性更优,因此广泛应用于货物运输AGV,如港口货运AGV、仓储搬运AGV等。相较于前轮阿克曼转向无人车,多轮转向无人车在行驶过程中会存在多轮辅助转向、车辆斜行等特殊场景。在以上特殊场景中,多轮转向无人车运动模型相较于前轮转向车辆发生改变,后轮轴中心处的横向和垂向速度不为0,且无法直接使用轮速进行前向速度约束。
M20X组合导航接收机针对差速无人车、多轮转向无人车以及部分特殊应用场景进行了深入适配,可进一步提高组合导航精度与稳定性。关于低速无人载体,您有哪些经验或见解?欢迎在评论区留言。
相关新闻