

司南技术π·第6期 | 基于多传感器融合技术的边坡监测预警方案
-
返回主菜单产品
-
返回主菜单服务支持
-
返回主菜单关于司南
-
返回主菜单投资者关系
-
返回主菜单加入我们
司南技术π·第4期 | 农机导航安装与技术讲解
返回列表知识分享
作者:司南导航
发布时间:2025年07月17日
关注企业公众号:


核心导读
农机导航行业主要涉及为农业机械提供精准导航和定位服务,以提高农业生产效率。随着现代农业的不断发展,农机导航技术的应用已成为推动农业机械化的重要因素之一。农机导航系统能够帮助农民在广阔的农田中实现自动驾驶、精确播种、施肥、除草等功能,极大地提升了作业效率和质量。
本期司南技术π将为大家介绍精准农业领域的解决方案- AG501 Pro农机自动驾驶系统。
系统基于司南导航自主研发的高精度板卡 K803和自动导航控制技术,能够对农业生产进行精细化管理,实现精准播种、精准施肥和精准灌溉等农业生产活动,提高农业生产效率和质量,降低生产成本。同时还可以实现农机作业的无人化和智能化,推动农业现代化进程,促进农业和农村经济持续、快速、健康发展。
01
农机导航控制原理
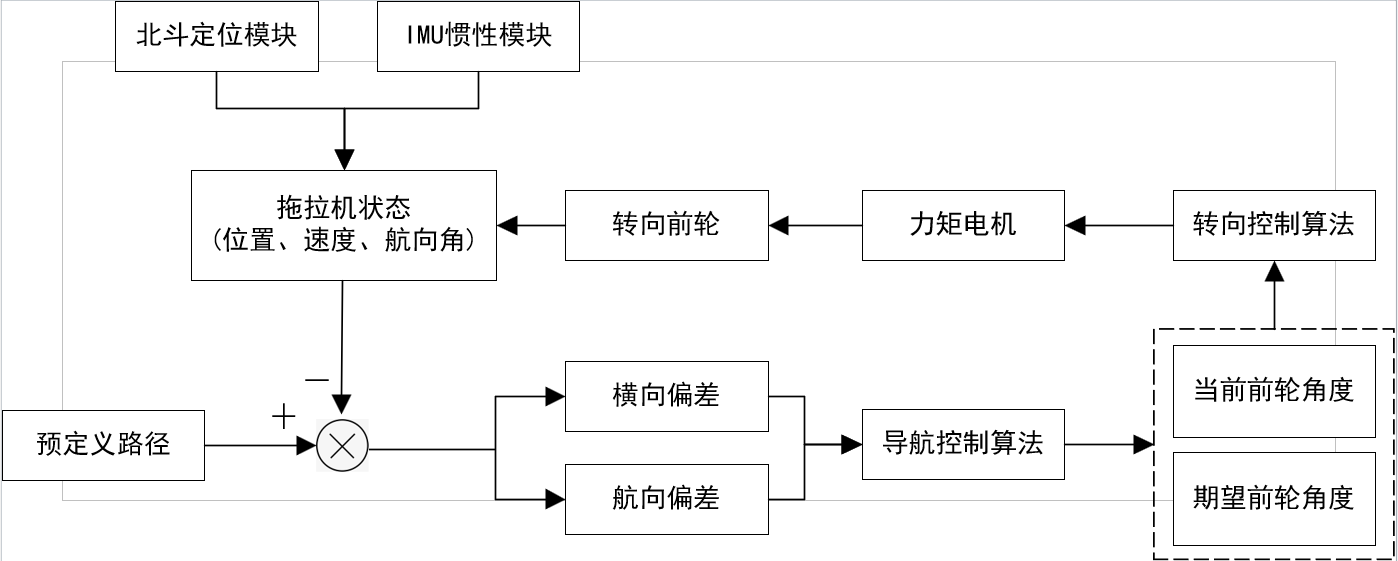
感知和规划
系统基于北斗导航定位模块和IMU惯性模块实时感知农机当前的状态信息,包括其位置、速度、航向角和姿态等。
基于预定义的农机自动驾驶路径以及农机当前的位置、航向等状态信息,计算得到农机的横向偏差(农机当前位置与目标路径的垂直距离)和航向偏差(农机当前航向角与目标航向角的角度差)。
导航控制算法基于车辆转向模型,结合横向偏差和航向偏差等车辆状态信息,计算出实现路径跟踪所需的期望前轮转向角度。
执行和反馈
控制单元接收期望前轮角度和当前前轮角度,构建闭环PID控制环节,计算得到精确控制量,驱动力矩电机动作。力矩电机带动车辆方向盘转动,实现车辆的转向控制。
转向前轮的实际角度被测量并反馈给转向控制算法,形成闭环(确保转向角度精确跟踪指令)。同时,前轮角度的改变带来拖拉机位置和航向的变化,这些新的状态信息又被北斗定位模块和IMU模块感知,并反馈给导航控制算法,形成一个闭环控制(确保拖拉机跟踪目标路径)。这样就构成了一个完整的闭环控制系统,不断感知偏差、计算输出、执行动作、更新状态,最终实现农机沿着预定义路径的精准自动导航。
核心闭环路径
预定义路径 -> (导航控制算法: 位置/航向 -> 偏差计算 -> 期望前轮角) -> (转向控制算法: 期望角 vs 当前角 -> 控制指令) -> 力矩电机 -> 转向前轮 -> 改变农机状态 -> GNSS/IMU感知 -> 导航控制算法...
02
内部配件
AG501 Pro系统主要包含以下部分:
• 力矩电机及方向盘
• 平板电脑
• 智能天线
• 电机线
• T型支架及固定架
• 电源开关支架
• 平板固定支架
• 线缆总成
• 电源线
03
软件操作流程
• 点击右下方“新建AB”;
• 根据作业需要选择作业类型,支持直线,曲线,对角耙,自由轨迹,自动掉头,A+航向,同心圆等多种作业类型。这里我们选择“直线作业”进行示例;
• 输入作业名称或使用默认作业名,点击右下角“确认”;
• 在田块的一端将拖拉机停正点击“A”;
• 手动驾驶农机开到田块的另一端后点击界面上的“B”;
• 采集好AB点后,点击右下角方向盘图标,即可实现农机自动驾驶,再次点击方向盘图标可退出自动驾驶。
04
结语
司南导航AG501 Pro产品经过两年全球春播秋收超千万亩的生产应用验证,确定是一款信号稳定、性能可靠的高精度农机自动驾驶系统。它具备卓越的全地形适应能力,支持超低速与高速作业,适配多种农机型号,提供直线、曲线、对角耙等多种作业模式。系统配有强大的现场售后服务团队,支持远程连接,实现极速售后响应与高效便捷的远程故障排除。全国各地的经销商和本地维保服务网络,确保用户在遇到问题时能够得到及时支持与解决。


全球超千万亩作业验证
相关新闻