

司南技术π·第4期 | 农机导航安装与技术讲解
-
返回主菜单产品
-
返回主菜单服务支持
-
返回主菜单关于司南
-
返回主菜单投资者关系
-
返回主菜单加入我们
司南技术π·第11期 | 农机导航产品架构以及关键技术的应用
返回列表知识分享
作者:司南导航
发布时间:2025年09月04日
关注企业公众号:


核心导读
随着现代农业大步迈向智能时代,农机导航系统已成为精准农业的强大引擎,直击传统耕作中人力成本高、作业精度低、土地利用率不足等核心痛点。在国家大力推进农业数字化与机械化融合的战略指引下,司南导航凭借多年技术积累,突破振动防护和信号抗干扰等关键难题,为全球用户带来可靠、高效的智能导航解决方案。实测证明,我们的系统可使作业效率提升30%以上。
本期「司南技术π」重点介绍
AG501 Pro单天线与AG502双天线导航系统,以互补组合全面覆盖不同市场需求:
AG501 Pro则以轻量设计和超高性价比,精准匹配中小农户的基本导航需求,广泛适配拖拉机、收割机等多种设备;
AG502凭借双天线GNSS技术,实现厘米级高精度定位,轻松应对复杂地形,助力农业经营提效降本。
Part1
AG501 Pro单天线农机导航系统
系统架构组成
AG501Pro系统主要包括:智能天线、方向盘及电机、前轮脚传&外置数传等选配件。
产品架构
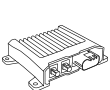
•Plus B平板是该系统的人机交互接口,主要功能是实现用户可以通过按键、触摸液晶屏显示查看与修改系统的配置信息、查看卫星的参数信息、格式化内置存储芯片等功能,收集智能天线上传的组合导航数据并进行显示定位导航的效果;
•A100 Pro智能天线中的GNSS板卡(K803)支持多个卫星系统,负责完成信号的模数转换处理,卫星的捕获、跟踪、及利用伪距、载波相位、多普勒信息以及星历和历书进行PVT定位计算。其中惯性模块通过 IMU 和GNSS 的数据融合算法,可实现高精度,抗磁干扰的定向和测姿。智能天线将惯导融合后的数据通过GD32F4传给Plus B平板供其APP使用;
•电机根据定位数据精准控制车辆的转向。
电源方案
防反电路
系统加入了防反设计,防止现场在接线过程中误将设备的负极接到供电设备的正极上,从而导致损伤设备。
过压欠压保护
具有欠压、过压保护功能,当输入电压超过保护门限时,设备自动切断电源输入,保护设备电路不受损坏,且当输入电压恢复到正常输入范围时,自动恢复供电。
电源转换
整个系统额定工作电源输入为9V-36V,设备内部各模块工作存在5V/3.3V等多种电源电路,电源转换部分采用DC/DC开关电源芯片实现。
关键器件-IMU核心参数
25℃、1σ 条件下,核心参数典型值如下:
•零偏稳定性(X/Y/Z 轴):, X、Y 轴 5.0°/hr ,Z 轴 4.0°/hr ,值越小,静止时自身 “漂移” 越小,长时间稳定测量越准,关乎惯性导航系统的定位精度。
•零偏重复性:0.1°/s ,体现零偏稳定性的可重复、可靠性,重复性好,标定后性能更稳定。
•轴间非正交:0.01deg ,陀螺仪三轴理想应正交(两两垂直),偏差大会使多轴运动测量耦合误差,影响姿态解算精度。
•g 值敏感误差:0.1°/s/g,受重力加速度 g 影响产生的角速度测量误差。
•内部低通截止频率:最小 0.2Hz ,典型 / 最大 47Hz ,软件可调,决定过滤高频噪声的能力,选合适值可平衡信号响应速度与噪声抑制。
•ODR(输出数据速率):输出频率范围 1 - 400Hz ,值越高,数据更新越频繁,能捕捉快速运动细节,但也增加数据处理负担,按需配置。
•测量延时:最大 5.0ms ,延时大会影响决策及时性。
• 随机游走(X/Y/Z 轴):0.3°/√hr( Allan 方差曲线),体现随机噪声积累特性,长时间积分时,随机游走会使误差随时间增长,需建模补偿。
•输出噪声:25℃、截止频率 47Hz 下,rms 值 0.05°/s ,噪声大会淹没真实信号,降低测量精度,影响基于角速度的控制、解算。
Part 2
AG502双天线农机导航系统
系统架构
AG502系统主要包括:接收机平板、方向盘及电机、车身&前轮脚传、GNSS双天线。

平板架构
AG502平板接收机硬件系统架构包括:Android主控单元、GNSS核心板卡(K823)、显示控制(人机接口)模块、电源管理、外部接口部接口等电路单元。
接口设计和实现
AG502平板电脑包括3个USB标准接口、1个type-c接口、两个LEMO头RS232、一个LEMO头CAN。

关键器件-电机核心参数
电机采用永磁同步直驱电机,它融合了永磁同步电机技术和直驱技术,以下是其详细介绍:
基本结构
定子:
与普通交流电机类似,由定子铁芯和三相绕组构成。定子绕组通入交流电后,会产生旋转磁场;
转子:
嵌入永磁体,如钕铁硼等高性能永磁材料,无需外部励磁,由永磁体直接提供磁场。
气隙:
定子与转子之间的间隙,其磁场由定子磁场与转子永磁体磁场共同构成,两者同步旋转,实现无滑差运行。
工作原理
电机静止时,给定子绕组通入三相对称电流,产生定子旋转磁场,该磁场在转子笼型绕组内产生电流,形成转子旋转磁场,两者相互作用产生异步转矩使转子加速转动。当转子加速到接近同步转速时,定子旋转磁场将转子牵入同步运行状态,此时转子绕组不再产生电流,由永磁体和定子绕组产生的磁场相互作用产生驱动转矩,使电机保持同步运行。
技术特点
高效节能、结构紧凑、低速大扭矩、运行平稳、控制精确
Part 3
技术原理与应用场景分析
导航控制技术原理
1)农机导航系统采用"感知-决策-控制"闭环控制架构,通过多源传感器融合实现作业环境感知。GNSS模块实时采集位置坐标,IMU单元同步输出三轴姿态角,两组数据经卡尔曼滤波算法融合后,生成厘米级定位与厘米/秒级速度信息。路径规划模块根据作业模式(直线/曲线)自动生成最优行驶轨迹,支持AB线、同心圆等多种作业路径类型。
2)控制流程图
3)转向控制过程
农业应用场景实践
后装市场
对比当前农业生产方式,智慧农业技术应用后可节约 50%的用工成本,土地利用率提升3%-5%以上。
高级别自动驾驶
耕种管收全过程的少人化和无人化,也有利于节约人力成本,吸引更多年轻技术人才从事农业生产,培育新型农民。”经测算,“无人农场”平均每亩节约劳动力成本30%以上,农民增收超过40%。
L3级无人驾驶
基于视觉识别等多源传感器融合,人工智能技术应用,实现车辆转移及特殊场景下稳定作业。
数字施工
依托北斗高精度定位、组合导航和倾角传感器等技术,通过高效实时的态势推导,精准计算施工数据,智慧化引导驾驶员进行整平、刷坡、挖沟作业作业效率大大提升,作业质量更有保障。
Part 4
结语
AG501 Pro与AG502农机导航系统,依托高精度北斗/GNSS核心技术、多源传感器融合及自适应抗干扰算法,实现了厘米级定位与稳定转向控制,显著提升作业精度与效率。系统支持复杂工况下高可靠性运行,为规模化农业提供了可扩展、高性价比的智能导航解决方案。我们将持续推动北斗在农业中的深度应用,以技术赋能现代农业机械化与数字化发展。
相关新闻