

-
返回主菜单产品
-
返回主菜单服务支持
-
返回主菜单关于司南
-
返回主菜单投资者关系
-
返回主菜单加入我们
全球卫星导航信号抗干扰技术解决方案
返回列表
摘 要:
全球卫星导航系统(GNSS)早已融入无人机、电力巡检、车载导航等领域的基础设施。然而,卫星信号在两万公里外传输至地面时,功率常低至-160 dBm,仅相当于一片落叶轻轻触碰大地的能量。这样的信号一旦遇上窄带噪声、连续波甚至扫频干扰,便可能瞬间“失明”。在复杂电磁环境日益普遍的今天,芯片抗干扰性能已不再是锦上添花,而是保障定位可靠性的核心竞争力。本文介绍基于司南自研最新的QIV芯片的抗干扰技术,以及在实际应用过程中的与我司自研QIII模块产品以及友商模组产品进行横向对比,深入剖析其抗干扰表现背后的架构优势及行业意义。
1引言
北斗三号系统在2020年全面建成,实现全球覆盖,这标志着中国导航技术进入新的高度。然而,地面应用环境却愈加复杂,城市的电磁污染、汽车发动机和通信设备辐射,甚至恶意干扰源,都可能让终端定位精度急剧下降。抗干扰技术由此从“可选项”变成了“必选项”。
GNSS抗干扰主要分为窄带干扰抑制(CWI)[1][2]与连续波干扰抑制(DCRF)两大技术路线。前者基于快速傅里叶变换(FFT)在频域检测并滤除干扰,适合窄带干扰,但功耗较高;后者则在时域进行连续波检测与抑制,响应快、功耗低,却无法覆盖所有干扰类型。近年来的趋势是两种技术融合使用,通过双通道架构,让芯片同时具备快速响应与广谱防御的能力。
2算法原理
2.1 窄带干扰消除技术(CWI抗干扰技术)
传统的窄带干扰消除技术主要基于频域滤波的窄带干扰抑制技术,其数字信号处理流程如图1所示:

图1. 频域滤波的信号处理流程图
首先重叠加窗模块将输入信号分为两路,两路信号有固定延时,并分别进行加窗处理;其次对加窗信号做快速傅里叶变换(FFT),将时域信号变换到频域;再将频域信号通过干扰抑制滤波模块,对干扰频点进行频域抑制滤波,以消除干扰;然后再将干扰抑制后的频域信号经过IFFT变换到时域;最后时域信号经过反加窗函数,实现干扰抑制后信号与输入信号之间的无缝链接输出。
针对现有干扰抑制系统存在的灵敏性和功耗缺陷,我司基带研发团队分别提出了新干扰检测模块,和新型干扰系统架构[3-6],分别用于增强系统的干扰探测灵敏度,和控制系统的整体功耗。
1)为了增强干扰抑制系统的干扰检测的准确性和灵敏度,在FFT变换之后频域滤波之前,增加基于非相干累加的自适应窄带干扰检测模块,如图2所示。该干扰检测模块的主要功能有通过非相干累加[7]能够有效提升干扰探测灵敏度,同理非相干累加次数越多干扰探测灵敏度也就越高,干扰抑制延迟也会随之增加。
2)为了降低干扰抑制系统在工程实现上存在的硬件资源功耗较大的问题,新增两种控制两种方式来控制干扰抑制系统的硬件功耗。方式一是通过单刀单掷开关K1控制干扰检测模块后所有模块的硬件功耗。当干扰检测模块没有检测到干扰时后续的处理模块完全不用打开,这部分功耗可以全部降下来;方式二是定时控制的单刀单掷开关K3控制从重叠加窗模块开始整个干扰抑制系统所有模块的硬件功耗。在干扰不是频繁发生的环境下,没有干扰时整个干扰抑制系统都不用打开,功耗可以忽略不计。最后通过单刀双掷开关K2控制选择抗干扰后的支路信号或者没有抗干扰支路信号。
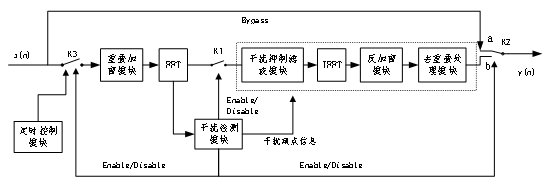
图2. 改进的窄带干扰抑制系统结构框图
2.2连续波干扰消除技术(DCRF抗干扰技术)
连续波干扰消除技术[8]通过对数字中频输入信号的处理,实现输入信号中连续波干扰信号的消除,如图3所示。连续波干扰消除模块接口包括干扰频率f及直流信号DC(n),其中,干扰频率f的设置可实现不同频率连续波干扰信号的消除,直流信号输出便于控制模块判断干扰是否存在、并可进一步估计干扰信号频率与设置的干扰频率之间的误差。
混频器a及直流消除模块实现连续波干扰信号的消除;混频器b的引入保证了整个连续波干扰消除子单元不会改变输入信号中有用信号的频率;重量化环节对连续波干扰消除模块进行重量化,不改变输入信号的位宽。
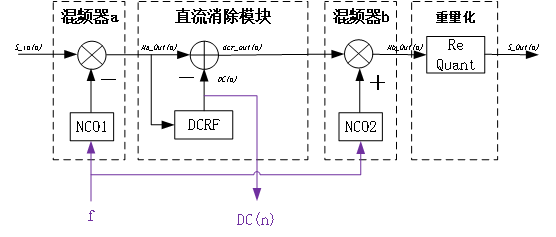
图3. 连续波干扰消除子单元结构框图
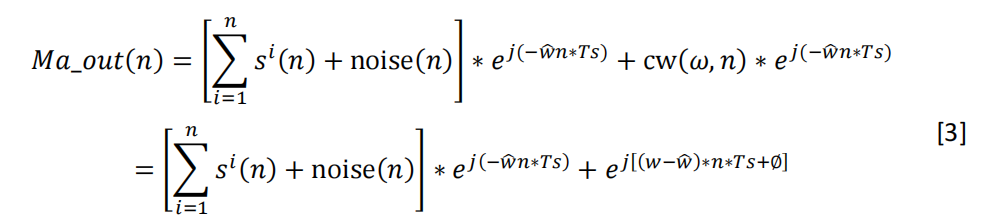
在接收机环境中存在连续波干扰的情况下,GNSS接收机射频前端输出的数字中频信号Sin(sn)可表示为:

其中,si为所接收到的卫星i的信号,noise为GNSS接收机的热噪声,cw为环境中的连续波干扰信号,w为连续波干扰信号的频率,Ts为采样周期, 为连续波干扰信号的初始相位。
为连续波干扰信号的初始相位。
干扰消除单元通过混频器a实现信号的频率搬移,连续波干扰信号被搬移至零频附近:
其中,si为干扰检测模块输出的连续波干扰的频率估计。经过混频器a处理后,输入信号中的连续波干扰信号分量变为:
![]()
由于干扰信号频率估计 接近干扰信号的真实频率
接近干扰信号的真实频率 ,因此,经过混频器a处理后,其中,连续波干扰信号被搬移至零频附近,变为一个“准直流”信号分量;因此,可以通过一个直流消除滤波器(DCRF,DC removal filter)对连续波信号进行时域估计,从而实现对干扰信号的消除。
,因此,经过混频器a处理后,其中,连续波干扰信号被搬移至零频附近,变为一个“准直流”信号分量;因此,可以通过一个直流消除滤波器(DCRF,DC removal filter)对连续波信号进行时域估计,从而实现对干扰信号的消除。
直流消除滤波器实现对低频信号“准直流”分量DC(n)的估计,设计简单,是信号处理的一种基础公知技术;典型的实现方式包括但不限于以下两种:

方式一对每N个数据进行平均作为直流信号的估计,因此,N越大,估计的“准直流”信号噪声性能越好,同时,动态响应越慢。方式二通过参数K的选择实现动态性能与滤波器带宽的折中。
经过直流消除模块以后的信号可表示为:

其中 ,包含连续波干扰信号消除以后残留的低频噪声,不影响后续基带信号处理单元对GNSS信号的接收。
,包含连续波干扰信号消除以后残留的低频噪声,不影响后续基带信号处理单元对GNSS信号的接收。
通过上式可以看出,经过第一级混频器a的处理以后,GNSS信号中频频率发生了搬移,因此,连续波/窄带干扰消除通过混频器b实现对GNSS信号中频的“逆搬移”,经过第二级混频器b的信号可表示为:
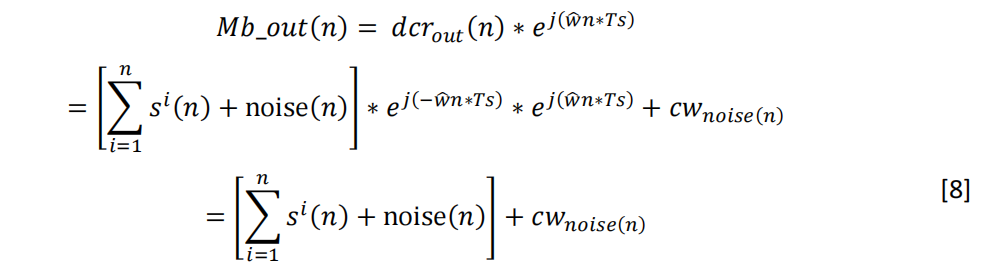
从上式可以看出,第二级混频器b引入确保连续波/窄带干扰消除模块完整的保留了信号中的GNSS信号成分,实现了对连续波干扰信号的消除。
3测试
3.1 测试概述
本次测试围绕三个核心场景展开:单音双通道抗干扰全开、抗干扰关闭基线,以及扫频干扰环境。测试方法严格控制变量,使用信号模拟器输出导航信号,与信号发生器叠加干扰,逐级提升干扰功率,实时记录载噪比(CN0)与失锁点。
测试对象包括三类:QC7820芯片(司南导航第四代核心芯片,支持双通道CWI+DCRF协同)、友商模组产品(主流GNSS模组,无双通道抗干扰设计)、K823模组(基于司南导航第三代核心芯片开发,具备部分抗干扰功能)。
3.2 测试环境搭建
抗干扰测试环境搭建如图4所示: 首先通过GNSS信号模拟器播放GNSS信号,同时信号发生器播发干扰信号,通过合路器输出带干扰的GNSS信号,再通过功分器将信号分别输出给QIV芯片的QC7820、QIII芯片的K823、和两个不同的友商模块,最后通过上位机采集载噪比CN0数据,通过切换不同的测试场景,对比分析干扰对GNSS信号能量的影响差异。
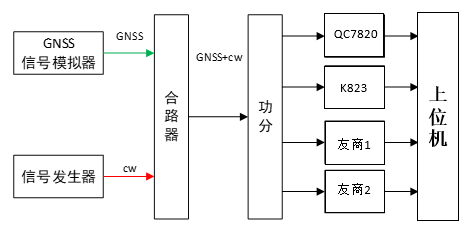
图4. S-Band信号接收验证环境搭建
3.3 测试数据及结果分析
1) 场景一:单音双通道抗干扰全开。在抗干扰算法全开条件下,将干扰频点设置为1561.098 MHz(BDS B1)和1575.42 MHz(GPS L1/Galileo E1),逐步增强干扰功率,可清晰观察三款芯片的抗干扰曲线,如图5所示。QC7820在两个频点的表现都保持高度一致:干信比下降缓慢,直到干扰功率达到-35 dBm时,仍能稳定追踪信号。相比之下,K823在相同功率下已出现明显的载噪比衰减,而友商模组更早进入性能崩塌区。值得注意的是,QC7820的双通道架构在面对多频点同时干扰时尤为突出——两通道协同开启后,可以在不显著增加功耗的前提下维持定位精度。
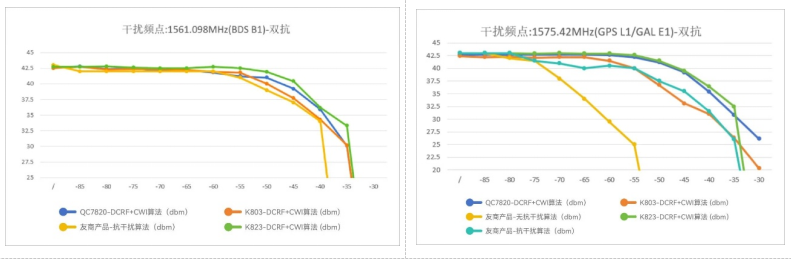
图5. 抗单音干扰对比(左:干扰频点1561.098MHz,右:干扰频点:1575.42MHz)
2)场景二:扫频干扰测试。扫频干扰模拟的是频率快速变化的电磁环境,如车载雷达、通信基站切换或恶意扫频攻击。本次测试选取两段扫频范围:1559~1563 MHz与1573~1577 MHz,覆盖BDS B1和GPS L1邻近频点。结果呈现出更为复杂的曲线特征,结果如图6所示:在1573~1577 MHz扫频段中,友商模组前期表现较强,但在干扰功率超过-25 dBm后迅速下滑,最终低于QC7820和K823;QC7820整体表现平稳,虽未在初期领先,但在高干扰区保持曲线平直,没有明显塌陷;K823则在后期表现略优于友商,但整体波动较大。在1559~1563 MHz扫频段中,友商模组在底点和高点均占优,但稳定性差,曲线在高干扰区出现明显波动。QC7820与K823表现接近,但QC7820的曲线更平滑,说明其在动态干扰下的自适应算法反应更为迅速。
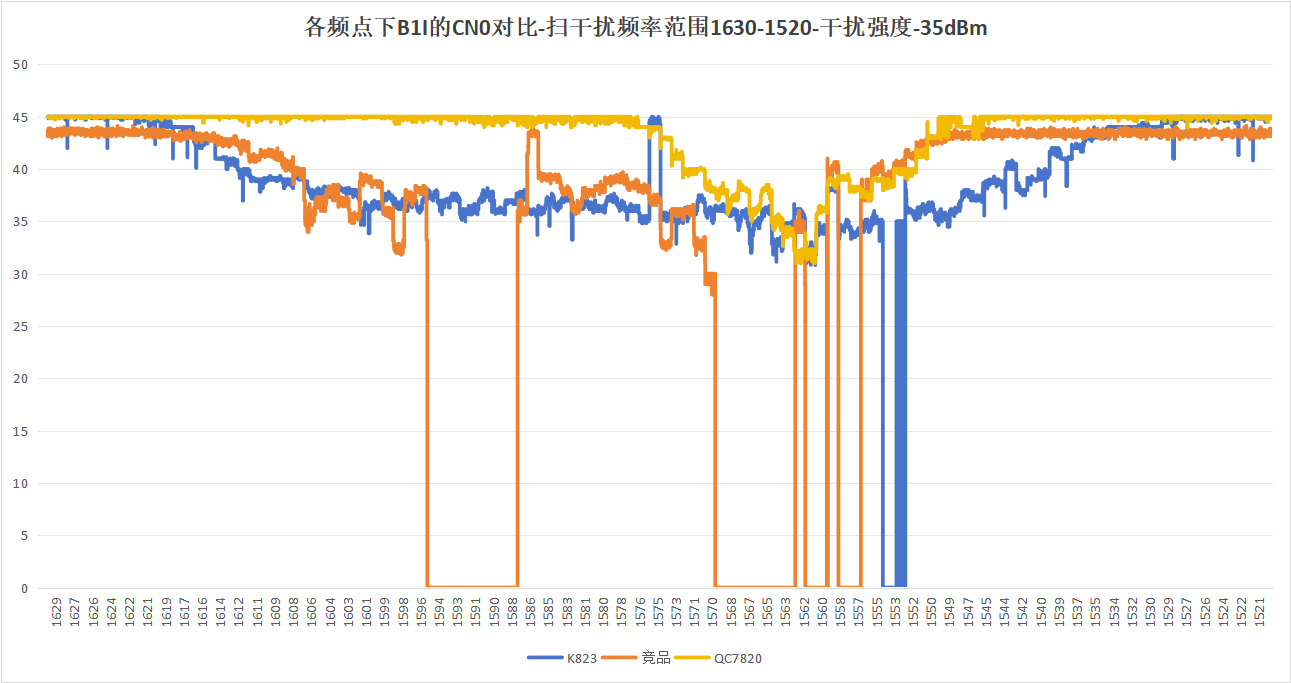
图6. 抗扫频干扰测试对比
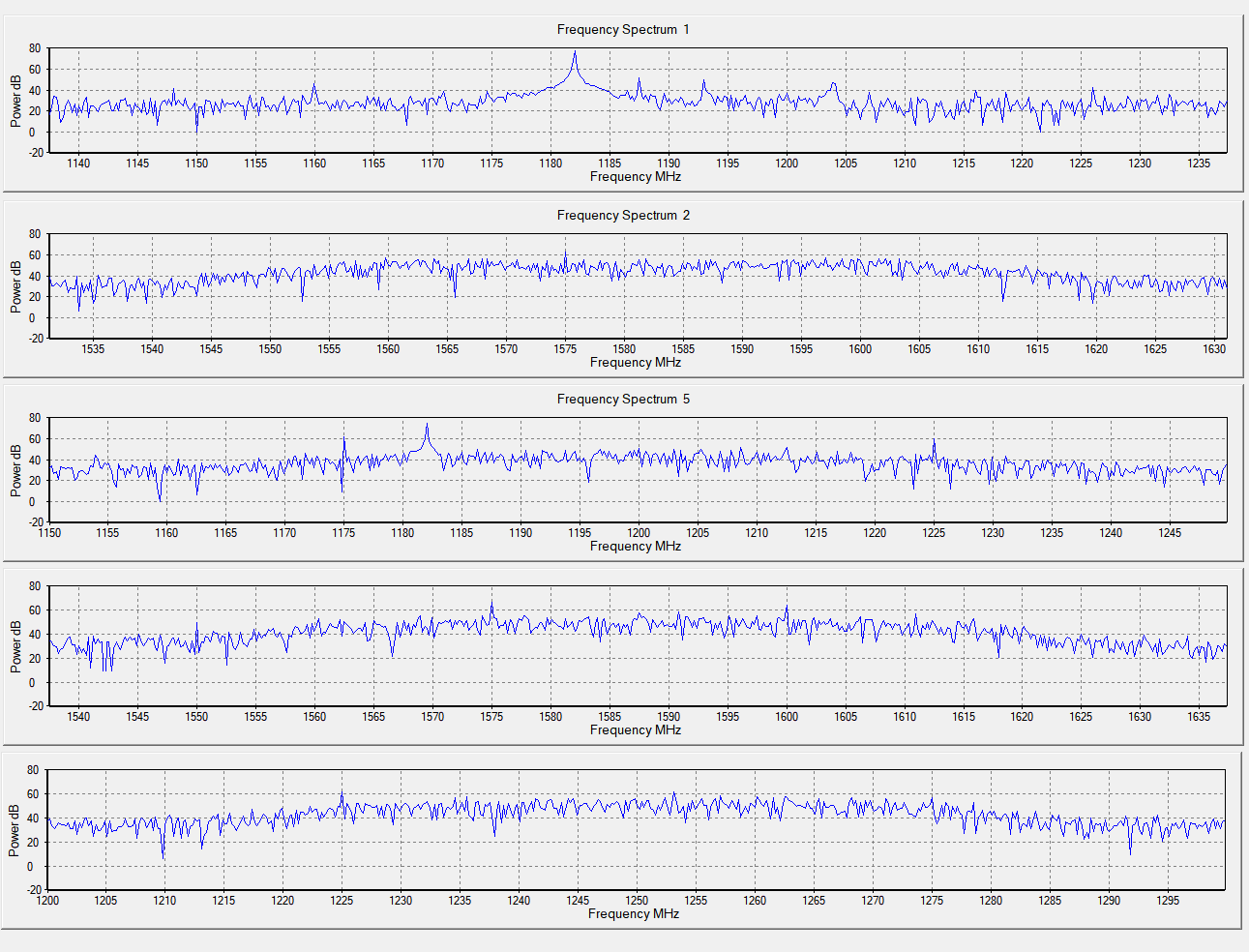
图7. 通过窗口实时显示干扰信号频谱,上图所示在射频通道1上存在1182MHz的单音干扰
3) 支持抗干扰模块开关热切换。抗干扰通道和无抗干扰通道信号可以无缝衔接,通过干扰自适应探测模块,探测每个信号频点是否存在干扰信号,对于有干扰的频点打开抗干扰模块,没有干扰的频点关闭抗干扰模块,在信号正常跟踪的情况下,热切换抗干扰模块,对信号接收没有任何影响,一方面能够动态实现有干扰时抗干扰、无干扰时省功耗,另一方面对信号接收实现无感切换。

4)支持干扰信号频谱显示。模块实时采集原始射频采样数据,经由快速傅里叶变换(FFT)和滤波处理后得到频谱数据,再将频谱数据以报文形式输出即可通过窗口实时显示干扰信号频谱,以便快速准确观测干扰信号的变化。如图7所示,在射频通道1上存在1182MHz的单音干扰。
4结论
从本次实测可以看出,基于QIV芯片的QC7820模块在双通道抗干扰架构下,兼顾了高性能与低功耗。在单音双通道测试中展现出的延迟失锁能力,直接提升了无人机在电磁复杂区域的飞行安全性;在扫频干扰测试中的平稳曲线,则为电力巡检和车载导航提供了可靠保障。更重要的是,关闭抗干扰算法后仍具备较好抗性,意味着QC7820可以在低功耗模式下运行,对穿戴设备和小型传感器尤为关键。
参考文献
[1] 翟晓东,徐敏.基于非相干积分的新型频域抗干扰系统设计[J].科学技术创新,2019(19):1-3.
[2] 翟晓东,张禛君.浅析针对全球卫星信号的弱干扰消除方案[J].科学技术创新,2023(19):213-216.
[3] 上海司南导航技术股份有限公司. 一种接收装置、终端装置和计算机可读存储介质[P]. 中国 CN201911424288.4, 2022-03-29.
[4] 上海司南导航技术股份有限公司. 一种接收装置、终端装置和计算机可读存储介质[P]. 中国 CN201911424192.8, 2022-04-01.
[5] 上海司南导航技术股份有限公司. GNSS board, terminal and narrowband interference suppression method [P]. 美国 US16/233305, 2020-02-11.
[6] 上海司南导航技术股份有限公司. 窄带干扰抑制方法及模块[P]. 中国 CN201711488235.X, 2021-01-12.
[7] 谢 刚, GPS原理与接收机设计[M]. 2017.
[8] 上海司南导航技术股份有限公司. 一种频率估计装置、终端以及计算机可读介质[P]. 中国 CN201811476932.8, 2022-02-25.