

高精度定位模块主要应用的领域
-
返回主菜单产品
-
返回主菜单解决方案
-
返回主菜单服务支持
-
返回主菜单关于司南
-
返回主菜单投资者关系
-
返回主菜单加入我们
技术干货 | GNSS模块/板卡数据质量评估方法
返回列表知识分享
作者:
发布时间:2022年05月06日
关注企业公众号:

摘要:随着北斗三号的全球组网以及LBS、物联网和智能驾驶的发展,GNSS模块开始向小型化、集成化方向发展,并越来越贴近人们的日常生活。GNSS应用也从专业应用开始走向大众应用。对普通用户而言,GNSS仍具有较强的专业性,在使用中难免会遇到各类问题。因此介绍GNSS模块的快速评估方法供大家参考。
目的
GNSS模块一般由两大部分构成,即实现信号捕获跟踪的射频基带模块以及定位解算的算法模块构成。信号捕获跟踪的性能直接决定了后续定位测速授时的精度,因而对GNSS数据质量进行评估意义重大。
方法
//零基线法
采用零基线双差,可消除或削弱卫星钟差、电离层误差、对流层误差、接收机误差、天相线位中心偏差等。因此,零基线双差的结果即为GNSS模块在信号捕获、跟踪上的内部噪声,所以可以用零基线双差的结果评估GNSS板卡的观测量精度。采用同一室外天线,接功分器送至两块板卡a、b,待搜星稳定后,连续观测30min,统计其载波、伪距精度。
——伪距精度
具体计算方法为:利用公式(1)先对板卡a和b的同一颗卫星的伪距观测值作差(单差);再利用公式(2)将不同卫星的两次单差结果再次作差(双差)。利用公式(3)可计算单颗卫星的伪距精度。下式中,O为伪距观测值,上标为卫星编号,下标为板卡编号,SD为单差观测量,DD为双差观测量。
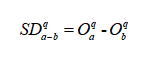 (1)
(1)
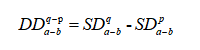 (2)
(2)
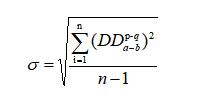 (3)
(3)
正常情况下,零基线双差观测值应为零均值高斯分布。且针对某一频点,接收机通道对于捕获跟踪具有一致性。因此,可采用某颗高度角和SNR较高的卫星作为参考星,对该频点的所有卫星求双差,则该频点的伪距精度为公式(4)
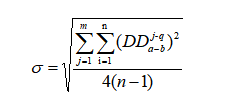 (4)
(4)
其中,i为历元,j为卫星的PRN号,q为参考星的PRN号,n为双差观测量个数。
——载波相位精度
同伪距跟踪有所不同的是,载波相位双差观测值会存在整周模糊度N,当卫星被持续跟踪时,整周模糊度是保持不变的,可对双差观测值历元间求差得到三差观测值以消除整周模糊度影响,如公式(5)。
 (5)
(5)
该频点的载波精度为
 (6)
(6)
式中,t1,t2为两个相邻历元,TD为三差观测值。
司南导航的K8系列模块采用新一代SOC芯片+AGC射频芯片架构,支持全频点全系统信号,具有较低的内部噪声和较高的观测量精度,达到国内一流水平。下表列出了K8双频模块的载波伪距精度同《北斗卫星导航系统民用全球信号多模多频高精度板卡产品技术要求和测试方法》里对GNSS模块的伪距载波精度。
表1 K8双频模块观测量精度
信号 | K8模块 | 规范要求 | ||
伪距精度(m) | 载波精度(c) | 伪距精度(m) | 载波精度(c) | |
L1 | 0.083 | 0.002 | 0.16 | ≤1mm |
L2C | 0.094 | 0.005 | 0.16 | |
G1C | 0.067 | 0.003 | 0.20 | |
G2P | 0.055 | 0.003 | 0.20 | |
B1I | 0.091 | 0.002 | 0.16 | |
B3I | 0.021 | 0.002 | 0.12 | |
E1c | 0.097 | 0.003 | 0.12 | |
E5b | 0.039 | 0.002 | 0.09 | |
//原始数据质量分析
目前主流的数据质量评估工具有TEQC,BNC,Anubis等,一般采用以下指标。
——信噪比(Signal-to-noise ratio,SNR):定义为信号功率与噪声功率之比,可用来衡量测距信号质量的优劣,信噪比值越大,说明观测信号的质量越好。一般情况下,RINEX文件会直接给出信号的信噪比。SNR与卫星高度角正相关,高度角越高,SNR值越大。
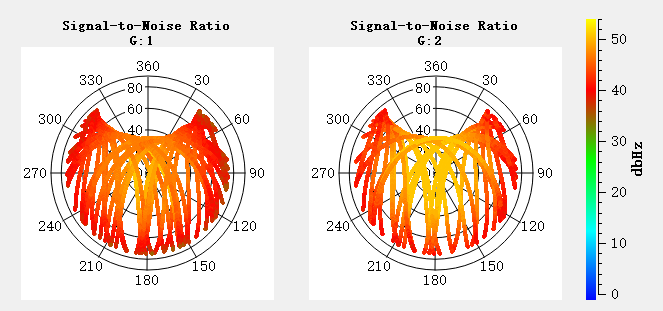
图1 K8模块GPS系统SNR天空图
——MP值:伪距多路径,可体现出模块的多路径抑制能力,一般越小越好。计算方法为:
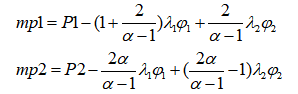
图2给出了K8双频模块的GPS多径天空图。

图2 K8模块GPS系统MP值天空图
——数据完整率:模块实际观测到的有效观测量的值/卫星星历计算的理论值。数值越大,表示板卡输出的观测数据越完整,对空无遮挡情况下,该数值应该为100%。
——周跳比(O/SLPS):板卡有效观测值的数量/周跳次数(周跳次数为0时取1)。
如果某颗卫星在单位历元的两个频率上,检测到周跳情况,则认为该历元产生周跳现象。一般采用MW和GF组合方法进行周跳的探测与评定,O/slips值越小,说明出现周跳越严重。
在对空无干扰环境下,周跳比大于8000。
表2 K8模块数据质量分析
BDS | GAL | GLO | GPS | |
观测时长(h) | 24 | 24 | 24 | 24 |
数据完整率(%) | 100 | 100 | 100 | 100 |
MP1(m) | 0.16 | 0.29 | 0.29 | 0.18 |
MP2(m) | 0.12 | 0.2 | 0.27 | 0.22 |
O/Slips | 1214246 | 236000 | 398990 | 488196 |
平均SNR1 | 45.22 | 43.66 | 47.96 | 44.32 |
平均SNR2 | 46.46 | 47.74 | 47.46 | 46.68 |
卫星总数 | 32 | 21 | 19 | 30 |
总结
本文介绍了双板卡零基线双差法、零基线三差法对观测量精度的评估方法,以及观测数据的质量评估指标,便于用户对GNSS模块快速评估,期望能为大家提供一些参考。
参考文献:
[1] GB/T 39399-2020, 北斗卫星导航系统测量型接收机通用规范[S].
[2] BDS-JSCS-2021-005, 北斗卫星导航系统民用全球信号多模多频高精度板卡产品技术要求和测试方法[S].
[3] 陈澍,任永超,张绪丰,等. GNSS 接收机原始观测值精度测试与分析[J].导航定位学报,2022,10(1): 140-146.